

Как показано на рисунке, луч, идущий от источника света, освещает щель (перекрестная сетка). Пройдя через поляризационный светоделитель (PBS), луч отражается и коллимируется линзой с фокусным расстоянием f. Возникающий свет — это параллельный свет. Когда луч достигает зеркала, он отражается обратно в коллимирующую линзу, проходит через светоделитель NPBS и, наконец, фокусируется на зоне обнаружения камеры CCD.
Если зеркало перемещается на небольшое смещение θ, в соответствии с законом отражения, отраженный луч от зеркала переместится на 2θ. Когда он сфокусировался на ПЗС-матрице, положение луча сместилось на Δ. Тогда мы можем получить связь между малым углом θ, фокусным расстоянием f и смещением луча Δ на ПЗС-матрице следующим образом:
tan2θ = Δ / f; (1)
Как правило, угол достаточно мал, так что уравнение (1) можно приблизительно записать как
2θ≈tan2θ = Δ / f (2)
Соответственно,
θ = Δ / 2f (3)
В уравнении. (3), f - конструктивный параметр коллимирующей линзы, Δ точно определяется камерой CCD. Таким образом, мы можем измерить смещение зеркала θ с высокой точностью.
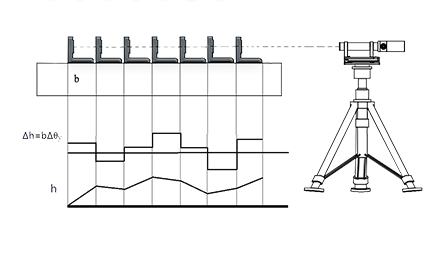
Измерение прямолинейности с помощью автоколлиматора
Отрегулируйте автоколлиматор и рефлектор и убедитесь, что автоколлиматор может получить изображение отражения в пределах всей области измерения. Поместите отражатель в исходное положение измерения направляющей, запишите угол компонента Y автоколлиматора, переместите отражатель и измерьте всю направляющую в соответствии с первоначально установленной точкой пересечения b. Угол компонента Y автоколлиматора отражает изменение высоты текущего положения направляющего рельса относительно исходного положения измерения, что проявляется в первоначально заданном наклоне каждого сегмента относительно исходного положения.
K = ΔY ’/ 2f’
или же
К = Δθy
Таким образом, изменение высоты текущей позиции в отношении начальной точки отсчета может быть вычислено.
Δh = Kb = Δθyb
ΔY ’- смещение положения перекрестия сетки нитей.
f ’- фокусное расстояние автоколлиматора
Δθy - угол составляющей Y фотоэлектрического автоколлиматора.
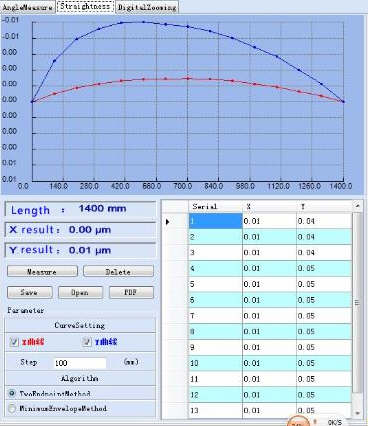
Кривая изменения прямолинейности всего направляющего рельса может быть построена в соответствии с методом наименьших квадратов или методом минимальной зоны и другими принципами подгонки.
Измерение плоскостности с помощью автоколлиматора

На рисунке показан принцип формирования плоскости в соответствии с линиями на образце с целью получения результатов измерения на плоскостность. Соответственно измерьте прямолинейность линий отбора проб на тестируемой панели и постройте плоскость тестируемой панели с помощью кривой прямолинейности линий отбора проб в соответствии с принципом линейности и соответствующим методом математической обработки.
Как показано на рисунке выше, проведите измерения вдоль боковой линии, диагональной линии и центральной линии пластины, подлежащей испытанию, а затем внесите в список и пронумеруйте линии от a до h. Проверьте прямолинейность каждой линии относительно начальной точки измерения, нормализуйте линии с пересечениями (A ~ I) каждой линии в качестве ограничения для соответствия прямолинейности всей пластины. При проведении нормализации ограничений точка пересечения наибольшего количества линий является основной точкой ограничения. Отбирайте в соответствии с фактическим спросом во время выборочной линии, но убедитесь, что линия отбора проб должна иметь пересечение. Линия должна быть симметричной, а характерная точка должна быть специально выбрана, чтобы как можно точнее отразить плоскостность пластины.
Измерение характеристик поворотного стола для прецизионных исследований с помощью автоколлиматора
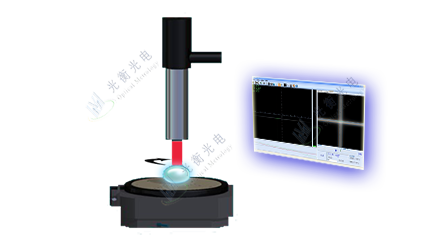
Точность вращения поворотного стола, при производстве измерений, является важным техническим количественным показателем, характеризующим производственные характеристики децентрализованного поворотного стола. Цифровой фотоэлектрический автоколлиматор серии AIM может быстро и точно измерить точность вращения поворотного стола. Как показано на рисунке выше, когда поворотный стол имеет осевое и радиальное отклонение, центральная ось поворотного стола (пунктирная линия, как показано на рисунке) вращается вокруг центра поворотного стола и образует определенный угол с теоретической центральной осью. (сплошная линия, как показано на рисунке). Кинематическая траектория формирует изображение круга на фотоэлектрическом автоколлиматоре. Предположим, что диаметр поворотного стола (D) и радиус окружности (α) известны, и точность вращения поворотного стола может быть вычислена. Выровняйте цифровой фотоэлектрический автоколлиматор по центру поворотного стола, поместите плоский отражатель и мастер-шар с лучшей плоскостностью, поверните поворотный стол, и тогда с помощью программного обеспечения Collimator мы сможем увидеть траекторию оптического изображения, измеренного фотоэлектрическим датчиком автоколлиматора, которое представляет собой круг.
Осевое и радиальное отклонение поворотной платформы
γ = α *(D)
D - диаметр поворотного стола
α - радиус окружности
Автоколлиматор для измерения угла оптического клина и пластины

Поместите автоколлиматор и проверяемый объект на испытательную платформу, отрегулируйте проверяемый объект так, чтобы автоколлиматор мог получать стабильное изображение, а затем отрегулируйте проверяемый объект, чтобы убедиться, что автоколлиматор может изменять угол только в одном направлении (Направление X). Угол наклона α составляет
α = δ / 2n
или же
α = ΔX ’/ 2nf = ΔθX’ / n
δ - угол между падающим и отраженным светом.
n - показатель преломления угла клина
ΔX ’- значение считывания компонента X поперечного изображения на целевой поверхности ПЗС или шкале.
ΔθX ’- значение показания компонента X фотоэлектрического автоколлиматора.
